Pre Training
- 프리 트레이닝(Pre Training) 이란
풀고자 하는 문제와 비슷하면서 사이즈가 큰 데이터로 이미 범용적으로 잘 학습이 되어 있는 모델
페이지 하단에 Tensorflow 와 Pytorch 코드예제 있음
- generative pre-training -> 제프리 힌톤(Geoffrey Hinton)
- 해당 탭은 발생적 사전 훈련 설명
- “A fast learning algorithm for deep belief nets”라는 2006년의 논문
-> 해당 논문을 통해 pre-training 을 제시 - Unsupervised Learning을 이용한 Pre-training
- 위의 힌톤 교수가 2006년에 제안한 방벙
Fine tuning
- 파인 튜닝(Fine-tuning) 이란?
모델의 파라미터를 미세하게 조정하는 행위
이미 존재하는 모델에 추가 데이터를 투입하여 파라미터를 업데이트하는 것. - 위키 피디아 설명
파인튜닝은 정교한 파라미터 튜닝이라고 생각하면 되는데 정교한과 파라미터가 키포인트들 이다.
개, 고양이를 분류기를 만드는데 다른 데이터로 학습된 모델(VGG16, ResNet 등) 을 가져다 쓰는 경우를 생각해보자. VGG16 모델의 경우 1000 개의 카테고리를 학습시켰기 때문에 고양이와 개, 2개의 카테고리만 필요한 우리 문제를 해결하는데 모든 레이어를 그대로 쓸 수는 없다. 따라서 가장 쉽게 이용하려면 내 데이터를 해당 모델로 예측(predict)하여 보틀넥 피쳐만 뽑아내고, 이를 이용하여 어파인 레이어(Fully-connected layer) 만 학습시켜서 사용하는 방법을 취하게 된다. 하지만 이 경우는 파인튜닝이라고 부르지 않는다. 피쳐를 추출해내는 레이어의 파라미터를 업데이트 하지 않기 때문이다. 어파인 레이어를 업데이트 하지 않냐고 생각할 수 있지만 내가 새로 구성한 레이어이기 때문에 업데이트가 아니며 초기 웨이트가 랜덤이기 때문에 정교하지도 않다. ** 파인튜닝을 했다고 말하려면 기존에 학습이 된 레이어에 내 데이터를 추가로 학습시켜 파라미터를 업데이트 해야 한다. 이 때 주의할 점은, 정교해야 한다. 완전히 랜덤한 초기 파라미터를 쓴다거나 가장 아래쪽의 레이어(일반적인 피쳐를 학습한 덜추상화된 레이어)의 파라미터를 습해버리면 오버피팅 이 일어나거나 전체 파라미터가 망가지는 문제가 생기기 때문이다. -
보틀넥 피처(Bottleneck feature)
모델에서 가장 추상화된 피쳐 - 어파인 레이어(AFFINE LAYER)
- 뉴럴 네트워크에서 완전 연결된 레이어 (fully-connected layer)입니다.
- Affine은 이전 레이어의 각 뉴런들이 현재 레이어의 각 뉴런들에 연결되어 있음을 뜻합니다.
- 뉴럴 네트워크의 표준 레이어
Transfer Learning
Transfer Learning 이란
- 기존의 만들어진 모델을 사용하여 새로운 모델을 만들 시 학습을 빠르게 하며, 예측을 높이는 방법
- 잘 훈련된 pretrainted model을 이용해서 마지막 final layer만 수정해서 본인의 목적에 맞게 다시 학습 시키는 방법.
- 잘 훈련된 모델이 있고, 해당 모델과 유사한 문제를 해결 시 Transfer Learning을 사용
![]() </img>
</img>
특정 목적을 가진 학습된 모델을 다른 일의 시작 포인트에서 재사용 하는 것
</img>
- Transfer Learning, fine tuning 사용 범주
- 새로 훈련할 데이터가 적음, original 데이터와 유사한 경우 (Transfer Learning 사용)
- fine-tune(모델 전체에 대하여 backpropagation을 하는 것)은 over-fitting의 위험이 있다.
- 새로 학습할 데이터는 original 데이터와 유사하기 대문에 이 경우 최종 linear classifier 레이어만 학습을 한다. (Transfer Learning)
- fine-tune(모델 전체에 대하여 backpropagation을 하는 것)은 over-fitting의 위험이 있다.
- 새로 훈련할 데이터가 많음, original 데이터와 다른 경우
- 새로 학습할 데이터가 많다 –> 오버피팅 위험이 낮다. –> fine-tune을 진행
- 새로 훈련할 데이터가 적음, original 데이터와 다른 경우
- 최동 단계의 linear classifier 레이어를 학습 + 네트워크 초기부분 activation 이후의 레이어를 학습하는것을 추천한다고 한다.
- 새로 훈련할 데이터가 많음, original 데이터와 다른경우
- 새로 훈련을 하는것 보다 전체 네트워크에 대해서 fine-turn을 하는 것이 더좋은 결과가 많이 나온다고 한다.
- 새로 훈련할 데이터가 적음, original 데이터와 유사한 경우 (Transfer Learning 사용)
Transfer Learning 부가 설명
Transfer Learning 탄생 배경
Breiman이 제안한 Born Again Trees.
앙상블을 통해 여러 모델을 합쳐서 좋은 성능을 내는것은 수학적으로 증명된 사실 이지만, 앙상블의 단점으로 높은 연상량과 모델의 복잡성이 있다.
-> 앙상블의 성능을 내면서도 더 간단한 모델을 만들기 위해 생각하기 시작
앙상블의 효과를 내면서도 의사결정나무의 장점인 해석력을 얻는 기법을 제안.
Transfer Learning 이 나온 후 비슷한 기법이 나오기 시작
Knowledge distillation
2015년 제프리 힌튼이 2015년에 발표한 논문
네트워크의 학습 결과를 softmax를 거쳐 분포를 나타내는데, cut-off를 0.5로 설정하면 이 위의 값들은 1로, 아래 값들은 0으로 라벨을 판별하는데 이런 형태를 hard target이라 하고, 1과0으로 변환되기 전 값을을 soft target이라고 한다.
soft target 분포를 목적으로 전이받는 네트워크를 학습시키면 knowledge transfer가 매우 효율적이라고 주장
Born Again Networks
용어
Teacher Network : 먼저 데이터셋에 대해 학습을 한 네트워크
Student Network : Teacher Network를 이용해서 데이터를 학습하는 네트워크
목적 Student 네트워크가 Teacher 네트워크의 “correct label” 과 “output distribution” 두 목표를 가지고 학습
해당 논문에서는 Student 네트워크를 “Born Again Network(BAN)”이라 명칭하고 DenseNet에 적용하여 좋은 결과를 얻었다고 한다. (추후 wide-renet도 학습)
Disentangling Task Transfer Learning
2018년 4월에 발표한 논문, CVPR 2018에서 Best Paper Award를 수상
기존 Transfer Learning은 source task와 target task를 하나씩 정해놓고 둘 간의 transferability(전이성)만을 단편적으로 판단.
둘 이상의 task들에 대한 전이성을 한 번에 보는것이 해당 논문의 아이디어(논문에서는 Taskonomy 라고 정의)
Related Work
- Self-Supervised Learning
- 레이블링 비용이 상대적으로 낮은 task로부터 학습한 정보를 활용하여, 그와 내재적으로 관련되어 있으면서 레이블링 비용이 더 높은 task에 대한 학습을 시도하는 방법들을 통칭합니다.
- 셀프 트레이닝 예시
- 레이블이 달린 데이터로 모델을 학습시킵니다.
- 이 모델을 가지고 레이블이 달리지 않은 데이터를 예측합니다.
- 이중에서 가장 확률값이 높은 데이터들만 레이블 데이터로 다시 가져갑니다.
- 위 과정을 계속 반복합니다.
- semi-supervised learning 기법 중 하나
- Meta-Learning
- 러닝 모델 학습을 meta-level(상위 레벨)에서의 좀 더 ‘추상화된’ 관점으로 조명하고, ‘학습 데이터셋의 종류를 막론하고, 모델을 좀 더 효과적으로 학습하기 위한 일반적인 방법’을 찾아내는 데 초점이 맞춰져 있습니다.
- Meta-learning이란, learning-to-learn 과 같은 말로써, 배우는 방법을 배우는 것
- Meta-learning모델의 목표는 적은 양의 새로운 데이터로 부터 새로운 task를 빠르게 학습하는 것
- 2017년에 나온 논문 https://arxiv.org/pdf/1703.03400.pdf
- 두 가지 모델이 존제
- learner model : 일반적인 classification, regression, reinforcement model과 같음.
- Meta-learner가 학습된 후 도움을 받아 학습
- meta-learner model : learner가 학습되는 것을 도와주는 모델
- learner의 parameter 업데이트를 meta-learner를 통해서 하는 방식
- learner model : 일반적인 classification, regression, reinforcement model과 같음.
- Multi-Task Learning
- 관련있는 테스크들의 representation을 공유함으로써, 모델을 더 좋게 일반화할 수 있는데, 이러한 접근방식을 Multi-Task Learning이라고 한다.
- 2018년에 나온 논문 https://arxiv.org/pdf/1707.08114.pdf
- 하나의 신경망이 여러작업을 동시에 할 수 있도록 학습하는 것
- 대표적으로 두 가지 방법이 있다.
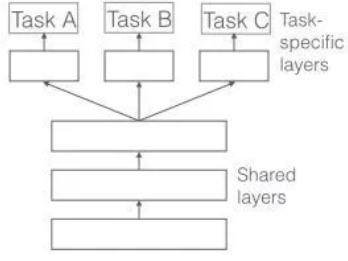
- Hard Parameter Sharing
- Hidden Layer를 공유하고 Task 별로 일부 개별적인 Layer를 가지고 가는 형태
 </img>
</img>
- Hidden Layer를 공유하고 Task 별로 일부 개별적인 Layer를 가지고 가는 형태
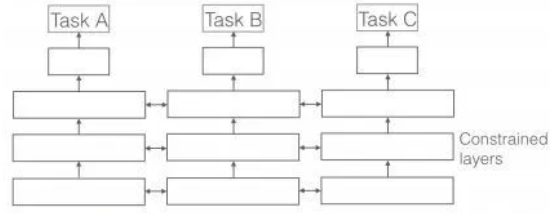
- Soft Parameter Sharing
- 각각의 Task 별로 별도의 Layer를 가지고 있다.
- 단, 각각의 Layer가 비슷해 질 수 있도록 L2 Distance를 사용한다.
 </img>
</img>
- Hard Parameter Sharing
- Multi-task Learning이 잘 동작하는 이유
- Implicit Data Augmentation
- 특정 데이터셋에 종속적으로 모델을 훈련하는 것보다 다양한 데이터를 활용하여 더욱더 범용적인 Representation을 만들어 낼 수 있다면 Over fitting을 회피할 수 있다.
- Attention Focusing
- Task가 지저분하거나 데이터가 제한적인 경우 모델이 관련이 있는 것과 없는것을 구분하기 힘들다 –> 이러한 경우 MTL 기법은 구분하기 위한 추가적인 정보를 제공해 줄 수 있다.
- Eavesdropping
- 특정한 Feature에 대해서 Task A가 학습하기 어려운 경우, Task B를 통해서 학습하기에 중요한 포인트를 받아 Task A를 훈련할 수 있다.
- Implicit Data Augmentation
- 다음과 같은 작업에서 쓰인다.
- 여러 문제들의 하나의 저레벨 특성을 공유할 때
- 데이터가 비슷할때 (항상 만족하는 것은 아닙니다.)
- 거대한 작업 세트들을 하나의 큰 신경망으로 한번에 학습 시키려고 할 때
- MTL은 joint learning, learning to learn, learning with auxiliary tasks와 같은 이름으로도 언급된다.
- Domain Adaptation(DA)
- transfer learning의 하나의 특수한 형태로, task는 동일하나 입력 데이터의 domain(도메인; 속성)이 크게 달라지는 경우(source domain -> target domain) 최적의 transfer policy를 찾기 위한 연구 주제입니다.
- 이전 task에서 배운 지식을 사용해 (정답이 없는) 새로운 상황에서도 맞출 확률을 올려주는 것을 목표로 한다.
- 2018, 2019년도 활발하게 사용 중 https://github.com/barebell/DA
- 두 가지 개념을 기본으로 결론 도출
- H-divergence
- 두 domain이 얼마나 다른지를 수치화한 값
- H는 classifier 의 classifier 에타 들의 집합을 의미
 </img>
</img>
- VC dimmension
- H-divergence 가 얼마나 복잡한지를 측정
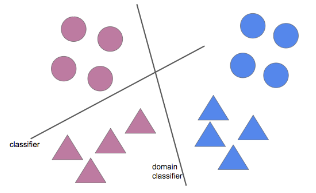
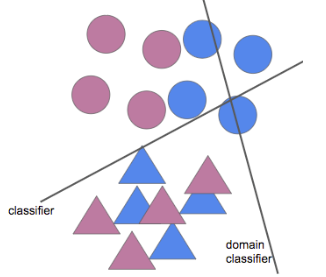
- 방법 - 새로운 도메인을 기존 도메인과 구분하지 못하게 하여 사용함
 </img>
</img>
 </img>
</img> - 두 도메인을 구분하지 못하도록 하는 방법
- Unsupervised Domain Adaptation by Backpropagation(ICML 2015)
- Adversarial Discriminative Domain Adaptation(CVPR 2017)
- Unsupervised Domain Adaptation by Backpropagation(ICML 2015)
- H-divergence
CODE
실행 코드
Tensroflow
- 모델 저장하기
# 모델 저장시 transfer learning을 쉽게하기 위하여 name을 붙여준다. with tf.name_scope('dnn'): hidden1 = tf.layers.dense(inputs, n_hidden1, activation=tf.nn.relu, name="hidden1") hidden2 = tf.layers.dense(hidden1, n_hidden2, activation=tf.nn.relu, name='hidden2') hidden3 = tf.layers.dense(hidden2, n_hidden3, activation=tf.nn.relu, name='hidden3') hidden4 = tf.layers.dense(hidden3, n_hidden4, activation=tf.nn.relu, name='hidden4') hidden5 = tf.layers.dense(hidden4, n_hidden5, activation=tf.nn.relu, name='hidden5') logits = tf.layers.dense(hidden5, n_outputs, name='logits') # Serve 정의 MODEL_PATH = './model/' saver = tf.train.Saver() # 모델을 쉽게 재사용 할 수 있도록 # 텐서플로 컬렉션(collection)에 저장 train_vars = {'inputs': inputs, 'labels': labels 'hiddens1': hidden1, 'hiddens2': hidden2, 'hiddens3': hidden3, 'hiddens4': hidden4, 'hiddens5': hidden5, 'logits': logits} # model save save_path = saver.save(sess, os.path.join(MODEL_PATH, 'my_model.ckpt')) - 모델을 불러와서 트레이닝 하기
- 동결시킨 Layer를 이용하여 캐싱기능도 지원한다.
- 4번째 레이어만 수정하기 (fine-turn) ``` # model load saver = tf.train.import_meta_graph(os.path.join(MODEL_PATH, ‘my_model.ckpt.meta’)) # 저장된 모델 weight 불러오기 inputs = tf.get_default_graph().get_collection(‘inputs’)[0] labels = tf.get_default_graph().get_collection(‘labels’)[0]
hidden3 = tf.get_default_graph().get_collection(‘hidden3’)[0] # 모델 추가 new_hidden4 = tf.layers.dense(hidden3, n_hidden4, activation=tf.nn.relu, name=’new_hidden4’) new_logits = tf.layers.dense(new_hidden4, n_outputs, name=’new_logits’)
…(트레이닝) ```
- freezing을 통한 Transfer Learning 방법1
# 학습과, 비학습 레이어를 정규식으로 구분할 예정이기 때문에 scope를 잘 정의해야 한다. # 학습시킬 레이러 설정 예시 with tf.name_scope('train'): optimizer = tf.train.GradientDescentOptimizer(learning_rate) train_vars = tf.get_collection(tf.GraphKeys.TRAINABLE_VARIABLES, scope='hidden[34]|logits') train_op = optimizer.minimize(cross_entropy, var_list=train_vars) # New Saver 정의 MODEL_PATH = './model/' new_saver = tf.train.Saver() # 재 사용할 레이어 불러오는 예시 reuse_vars = tf.get_collection(tf.GraphKeys.GLOBAL_VARIABLES, scope='hidden[123]') # 정규표현식 restore_saver = tf.train.Saver(reuse_vars) # scope인자에 정규표현식으로 넣어준디 tf.train.Saver() 에 넣어준다. with tf.Session() as sess: restore_saver.restore(sess, './model/my_model.ckpt') # Train the New Model 1~2는 모델로드 하여 삽입 3~4모델은 모델을 불러와 옵티마이저(학습)으로 삽입 with tf.Session() as sess: tf.global_variables_initializer().run() restore_saver.restore(sess, os.path.join(MODEL_PATH, 'my_model.ckpt')) for epoch in range(n_epochs): for batch_x, batch_y in shuffle_batch(train_x, train_y, batch_size): sess.run(train_op, feed_dict={inputs: batch_x, labels: batch_y}) # validation accuracy_val = accuracy.eval(feed_dict={inputs: valid_x, labels: valid_y}) print('epoch: {:02d}, valid. Acc: {:.4f}'.format(epoch, accuracy_val)) # save the new model save_path = new_saver.save(sess, os.path.join(MODEL_PATH, 'my_transfer_model.ckpt')) - freezing을 통한 Transfer Learning 방법2
# tf.stop_gradient()를 동결(freezing)시킬 마지막 레이어(예시에서는 hidden2)바로 뒤에 사용하여 Transfer learning을 수행 할 수 있다. with tf.name_scope('dnn'): hidden1 = tf.layers.dense(inputs, n_hidden1, activation=tf.nn.relu, name='hidden1') # Reusing hidden2 = tf.layers.dense(hidden1, n_hidden2, activation=tf.nn.relu, name='hidden2') # Reusing hidden2_stop = tf.stop_gradient(hidden2) # freezing hidden3 = tf.layers.dense(hidden2_stop, n_hidden3, activation=tf.nn.relu, name='hidden3') # Reusing hidden4 = tf.layers.dense(hidden3, n_hidden4, activation=tf.nn.relu, name='hidden4') # New logits = tf.layers.dense(hidden4, n_outputs, name='logits') # new with tf.name_scope('loss'): cross_entropy = tf.reduce_mean( tf.nn.sparse_softmax_cross_entropy_with_logits(labels=labels, logits=logits)) # tf.stop.gradoent() 를 포함한 모든 hidden layer를 옵티마이저에 넣는다 with tf.name_scope('train'): train_op = tf.train.GradientDescentOptimizer(learning_rate).minimize(cross_entropy) # New Saver 정의 MODEL_PATH = './model/' new_saver = tf.train.Saver() # Reusing layer load reuse_vars = tf.get_collection(tf.GraphKeys.GLOBAL_VARIABLES, scope='hidden[123]') restore_saver = tf.train.Saver(reuse_vars) # 모델 불러오기 tf.global_variables_initializer().run() restore_saver.restore(sess, os.path.join(MODEL_PATH, 'my_model.ckpt'))
Pytorch - transfer learning 사용 방법
- 모델 동결 및 레이어 추가하여 학습하기
# 모델 로드후 동결 시키기 model_conv = torchvision.models.resnet18(pretrained=True) #requires_grad = False 를 줘서 모델 동결 for param in model_conv.parameters(): param.requires_grad = False # 레이어 추가 # Parameters of newly constructed modules have requires_grad=True by default num_ftrs = model_conv.fc.in_features model_conv.fc = nn.Linear(num_ftrs, 2) # 트레이닝 시 사용할 device 설정 model_conv = model_conv.to(device) # 손실함수 criterion = nn.CrossEntropyLoss() # 옵티마이저 optimizer_conv = optim.SGD(model_conv.fc.parameters(), lr=0.001, momentum=0.9) # Decay LR by a factor of 0.1 every 7 epochs exp_lr_scheduler = lr_scheduler.StepLR(optimizer_conv, step_size=7, gamma=0.1) #트레이닝 model_conv = train_model(model_conv, criterion, optimizer_conv, exp_lr_scheduler, num_epochs=25)
참조
- pre training 개념 및 히스토리 http://t-robotics.blogspot.com/2015/05/deep-learning.html#.XhHJGUcza1s
- fine tuning 설명 http://blog.haandol.com/2016/12/25/define-bottleneck-feature-and-fine-tuning.html
- Transfer Learning 개념 https://goodtogreate.tistory.com/entry/학습-모델의-재사용-Transfer-Learning
- Transorfer Learnnig - Tensorflow 사용 방법 https://excelsior-cjh.tistory.com/179
- Transorfer Learnnig - Pytorch 사용 방법 https://pytorch.org/tutorials/beginner/transfer_learning_tutorial.html
- Self-Supervised Learning 설명 https://jayhey.github.io/semi-supervised%20learning/2017/12/07/semisupervised_self_training/
- Meta-Learning 설명 https://wewinserv.tistory.com/118
- Multi-Task Learning 설명 https://vanche.github.io/MTL/
- Domain Adaptation 설명 https://blog.lunit.io/2018/04/24/deep-supervised-domain-adaptation/ https://blog.lunit.io/2018/09/14/cycada-cycle-consistent-adversarial-domain-adaptation/ - 간단한 설명
- 논문 설명 http://research.sualab.com/review/2018/08/14/taskonomy-task-transfer-learning.html https://blog.lunit.io/2018/09/05/taskonomy-disentangling-task-transfer-learning/